Pally Palletizing Software vs. UR Palletizing Template | Comparison
May 11, 2023 | 16 minutes of reading | Written by
Rocketfarm
In this article, we’re comparing Pally Palletizing software for Universal Robots with the free Palletizing Template built into the collaborative robots from Universal Robots.
At Rocketfarm, we are palletizing experts and want to be honest with you.
It may seem biased that we, the creators of Pally Palletizing Software, are writing a comparison between our product and our main competitor – the in-build UR Palletizing Template. Either way – we will be candid and provide a fully transparent comparison.
– Why should I pay for your software, when I can just use the Free UR Palletizing Template?
This is probably the question we get most from potential partners within the UR Ecosystem (UR Distributors and UR System Integrators), and it’s a good question. Why should you actually pay for a palletizing software when a free version is available?
There are many good reasons why buying a palletizing software will be better for your business than using the UR Palletizing Template. Once the differences are clear, you can make the best decision for you (and we believe the best decision is to use a palletizing software).
You can trust that we will be honest and transparent because we don’t have any reason not to be. To give you the best starting point to decide is in our best interest. Therefore, we believe an honest review is best for you, and hence it’s best for us.
Structure
The comparison between Pally Palletizing Software and UR Palletizing Template is structured using the five phases that we have identified that the customer will go through in their journey with automated palletizing.
These five phases are:
Awareness
Purchase
Installation
Operation
Modifications
We have chosen this to illustrate that the difference between using a palletizing software and the template, starts from the beginning of the customer journey when a customer is considering what palletizing automation to invest in.
The Awareness Phase is the first phase of the customer journey and is where the customer researches online, asks the system integrators for quotes, and figures out what solutions are available that will solve their production requirements.
Upfront verification and testing solutions
UR Palletizing Template: To verify a solution upfront using the UR Palletizing Template is very time-consuming. A System Integrator would need to build the palletizing solution with the hardware required to solve the customer requirements, receive a pallet with the necessary products for palletizing, and get an overview of other conditions (such as, but not limited to, pattern, label direction, shim paper, etc.). Then they would code the pattern, layer by layer, into the robot and try to succeed. If the pattern fails, let’s say on the top layer, due to too low robot mounting height, they would have to start over and mount the robot at a different height and start coding the pattern layer by layer.
This test and try to succeed process would continue until the pallet is palletized. Then a video of this is sent to the customer, who can evaluate if they believe in this solution.
Even with simple requirements, this process is long with many different stakeholders, transport, decisions, etc. Creating and delivering an upfront verification of a project this way is costly, time-consuming, and involves a high degree of risk for both the customer and the System Integrator.
With more complex requirements or several products to be palletized, it’s almost impossible or at least hazardous.
Pally Palletizing Software: As part of our software plan, we offer access to MyRobot.cloud – a Palletizing Search Engine for end-customers. For System Integrators and Distributors, it is a Palletizing Robot Management System. For both, the platform is based on Digital Twin technology and empowers everyone to create upfront verifications of their products and requirements.
Customers: Can easily (in 5 min) enter product and production requirements, and get it verified with a UR Palletizing Solution (powered by Pally). Once it’s verified, we will match the customer with available solutions in their area. The whole process happens within 1 hour.
System Integrators/Distributors: Have access to more advanced functionality where they can more easily test different patterns, different hardware setups, or software settings to quickly deliver their customer with an upfront verification of the requested products through a Digital Twin Simulation. With this, it is easy to identify any issues (reach, production rate, etc.) and fix them. As it’s possible to edit every box on every single layer, it’s a lot easier to get the full potential of the robot and match it with customer requirements.
The above process for delivering upfront verification with Pally Palletizing Software involves almost no risk and little time for the customer and the System Integrator/Distributor – and is a valid process in both simple and very complex projects.
Even if the System Integrator were asked to build a physical version of the robot at their workshop to add additional proof to the customer, this is very easy, as the Project Report delivered as part of the upfront verification from MyRobot.cloud includes ALL installation details needed to set up a solution. Both in terms of hardware, software, and measurements.
Recurring problems during this phase
From both System Integrators and UR Business Development Managers, who frequently go on customer visits and discuss the potential of cobot palletizing, we hear that it often becomes clear that the project complexity is much higher than assumed by the customer, and hence what information they’ve chosen to share. Therefore, handling, testing, and verifying the added complexity in the palletizing solution requires a lot of solution flexibility.
We won’t conclude, but will share a testimonial from our partner, System Integrator Binder from Spain:
The functionality of the Pally Software saves us when we get surprised by the palletizing complexity we weren’t told about beforehand. Instead of doing complicated coding to solve the issue, we can easily enter the new specs, and Pally solves the complexities for us – to incredible satisfaction for the customer.
Khaled CEO, Binder Industrial Systems
2 – 3: Purchase and Installation phase
The following two phases are the purchasing and installation processes, when the customer agrees to purchase the solution, and when it gets installed on-site.
Physical Installation
When the customer approves the FAT (Factory Acceptance Test) or upfront verification, and the quote is approved, it’s time for the physical installation of the robot at the customer facility.
UR Palletizing Template: Setting up the native UR palletizing template requires every box to be taught independently for more complex patterns, meaning that minor deviations in the boxes could cause collisions.
The process of configuring the native UR palletizing template is time-consuming due to the need to code every movement of the box manually.
Pally: From the Project Report delivered with the upfront verification (and several if the customer has several products), you have all the installation details you need. Set up the hardware, install the license using a demo license, calibrate the system, and import the patterns you need from the pattern generator in MyRobot.cloud (as the robot is programmed through the JSON file downloaded through MyRobot.cloud), test and ensure that everything works. When both parties agree, the Pally Plan is activated on the robot, and the customer can start palletizing.
The next day is usually about training the staff, who usually won’t encounter any issues as the interface is simple and in a language they understand. More on that later.
Reach
Reach issues are the most common issues in cobot palletizing. As said by Halvor Gregusson, CIO, at Rocketfarm:
Pally will calculate the ideal path to achieve its objective, including the ability to pick up a box or boxes from the necessary direction to ensure appropriate robot reach.
A new direction can be utilized with each pick. Together with a gripper with COG offset, this enables MAJOR reach differences. Especially combined with an average end customer requirement of “Labels facing outwards.”
This difference is easily the difference between whether a project needs a lifting column or not, saving 4k EUR in HW costs
Halvor Gregusson CIO, Rocketfarm
EOAT (End of Arm Tool) Features
End of Arm Tools (EOAT) has many different features that can enable better palletizing. Still, taking advantage of these features with UR Palletizing Template is very complicated and time-consuming.
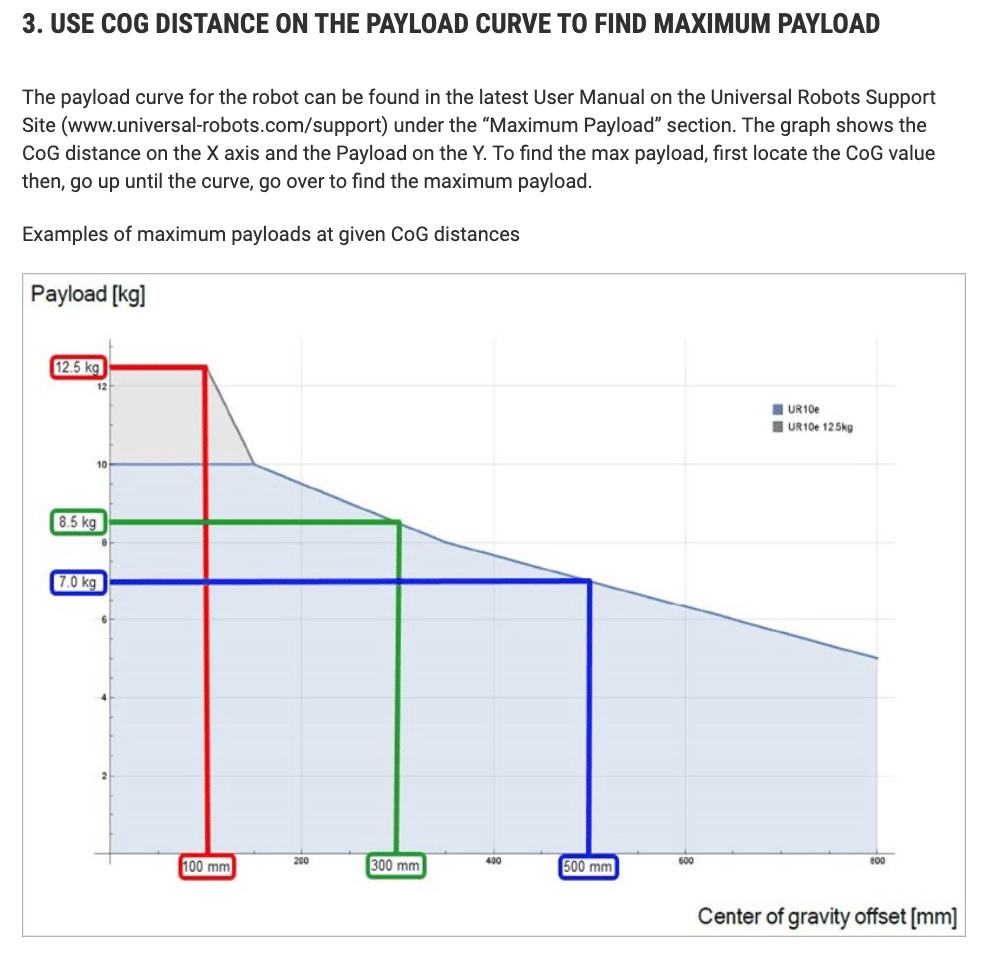
An example would be the Piab CPT Gripper, which is designed to maximize the payload and reach of UR10e and UR20 robots. The gripper is equipped with a 100mm Center of Gravity (COG) offset to achieve the goal. As shown in the chart below, this is the maximum COG the robot can handle to lift its entire payload.
To take advantage of this offset on the gripper, you need to be aware of the gripper pick-up position, in addition to the position of the box on the gripper.
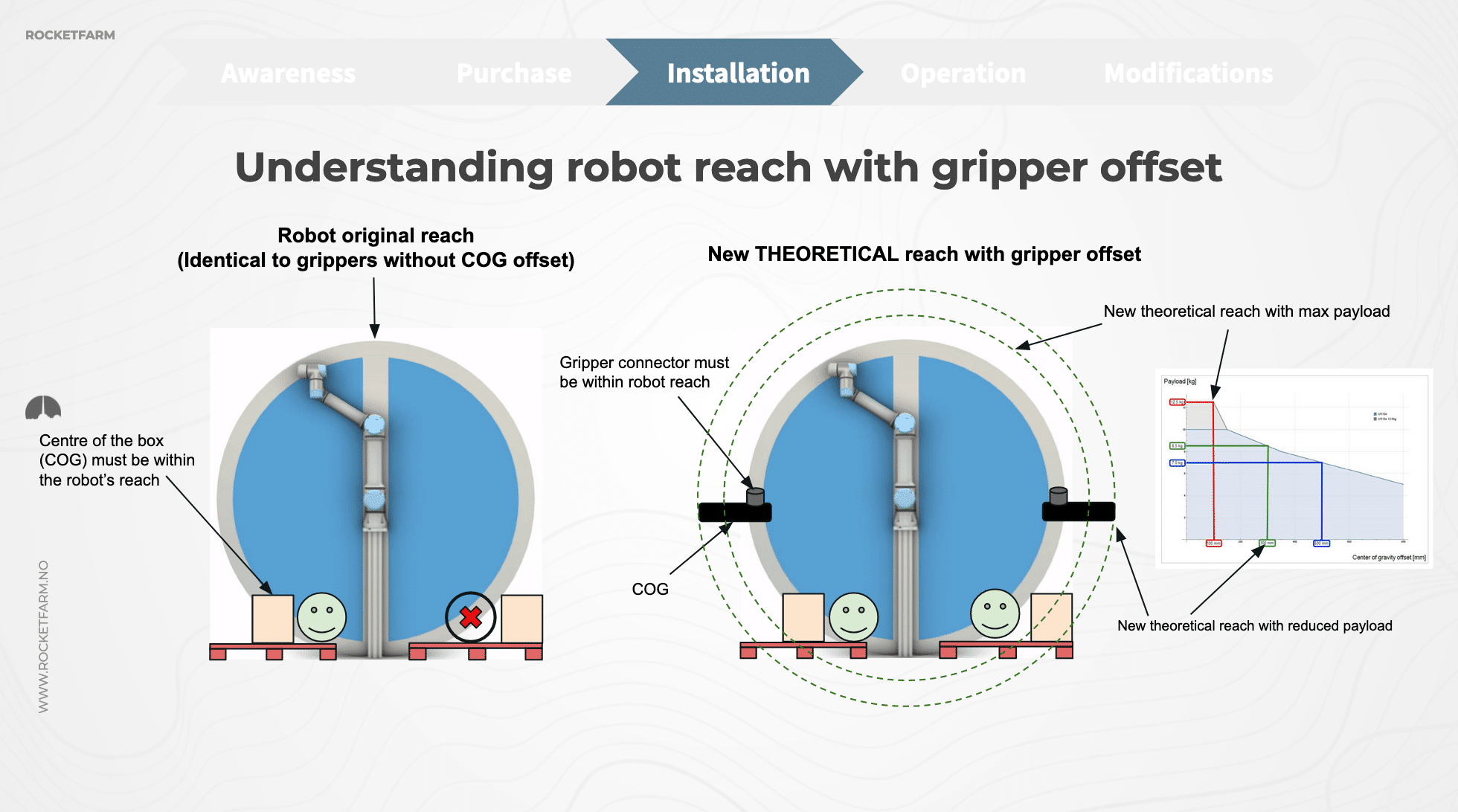
Graphical explanation of original reach and theoretical reach with gripper offset
And then exploring the more realistic reach of the robot
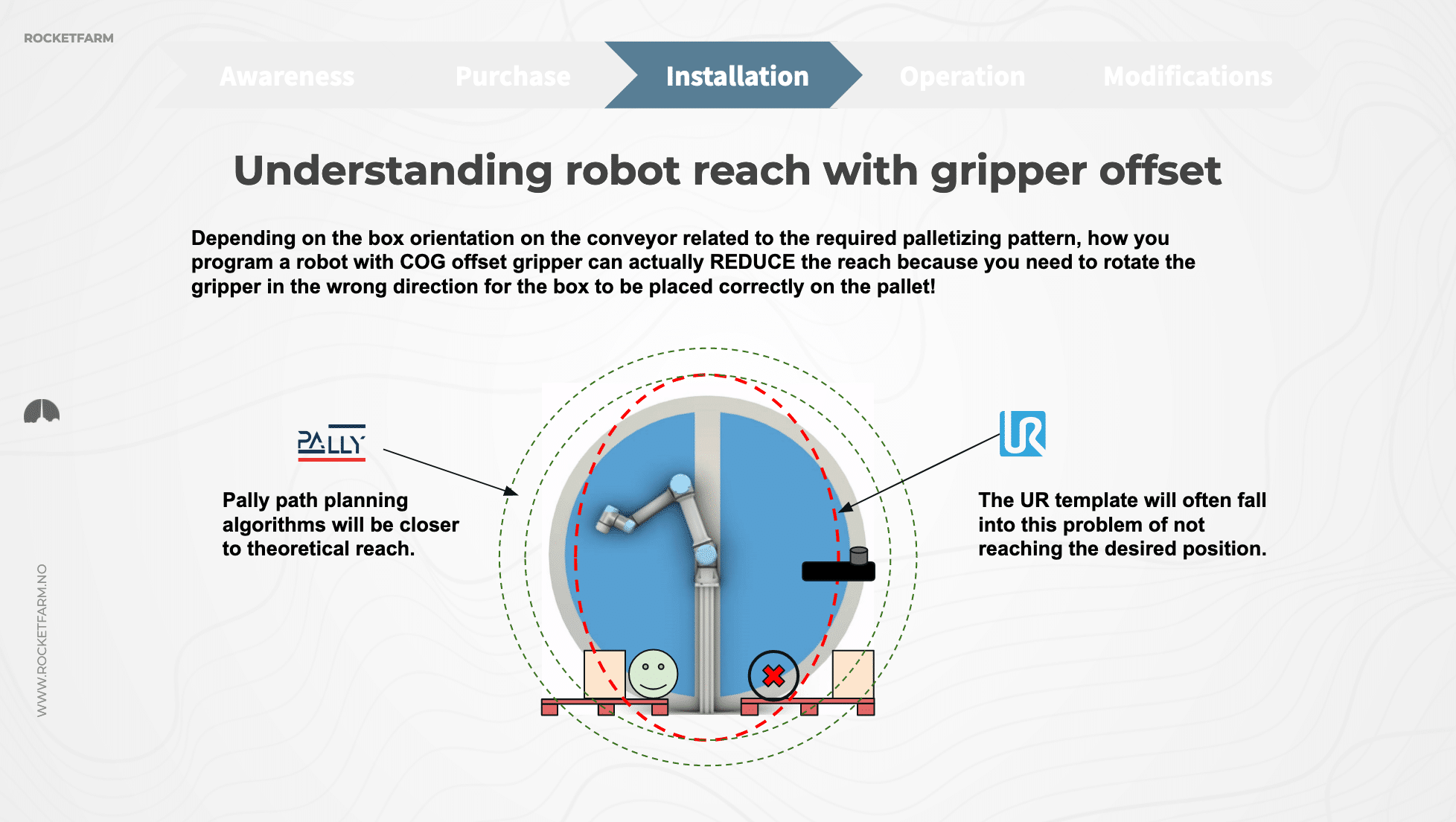
If the robot is not programmed to use the COG offset gripper properly, the reach can be affected when the box orientation on the conveyor does not match the required palletizing pattern. This situation can arise when the gripper needs to be rotated in the wrong direction to place the box correctly on the pallet.
Furthermore, we will examine how to adjust the robot’s reach in relation to EOAT and the difference between the palletizing template and Pally.
UR Palletizing Template: To edit the gripper pick-up position, it is necessary first to identify all boxes outside the robot’s reach with the standard pick-up position. Then you need to hard code into the current pattern that the pick-up position has to be different for each of these boxes. You’ll need to code precisely how it should differ– a significant task.
The coding needs to be repeated every time you make changes, as in changing to a different product (then you need to do it for the new product, and you need to do it if you switch back to the original product again).
Optimizing the solution to EOAT tool features with the Palletizing Template is entirely possible. Still, it requires much knowledge about palletizing and how to code the robot.
Pally: Pally will calculate the ideal path to achieve its objective, including picking up a box or boxes from the necessary direction to ensure appropriate robot reach. A new direction can be utilized with each pick. The calculations happen automatically, without ANY coding. It’s all based on the information available to Pally in the uploaded pattern file (created in MyRobot.cloud).
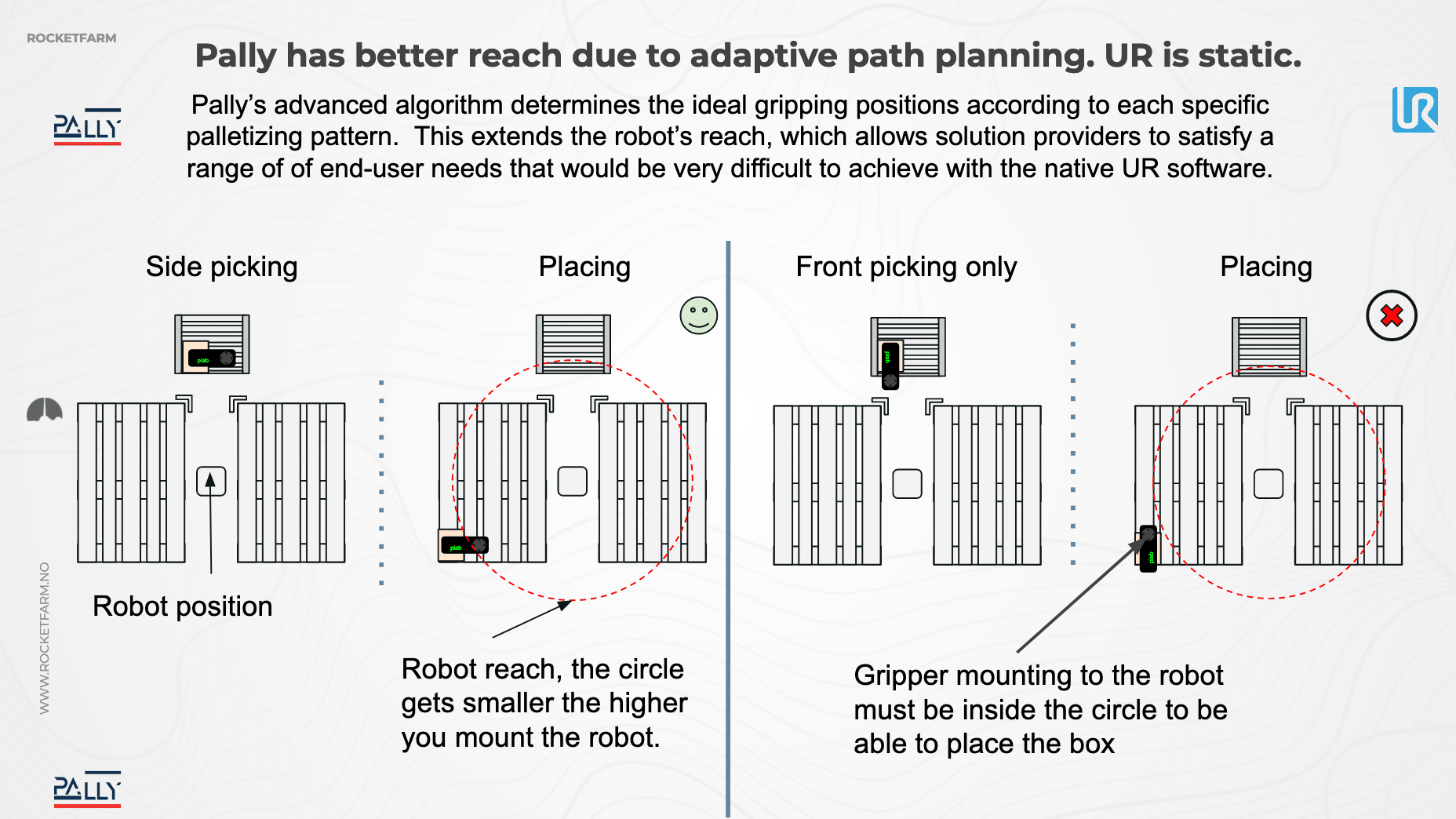
The following illustration showcases the difference between robot reach with front-picking (UR Palletizing Template) and with 4-way gripper optimization (Pally can grip from 4 directions):
Together with a gripper with COG offset, this enables MAJOR reach differences. Combined with a typical end customer requirement of “Labels facing outwards,” it gets noticeable.
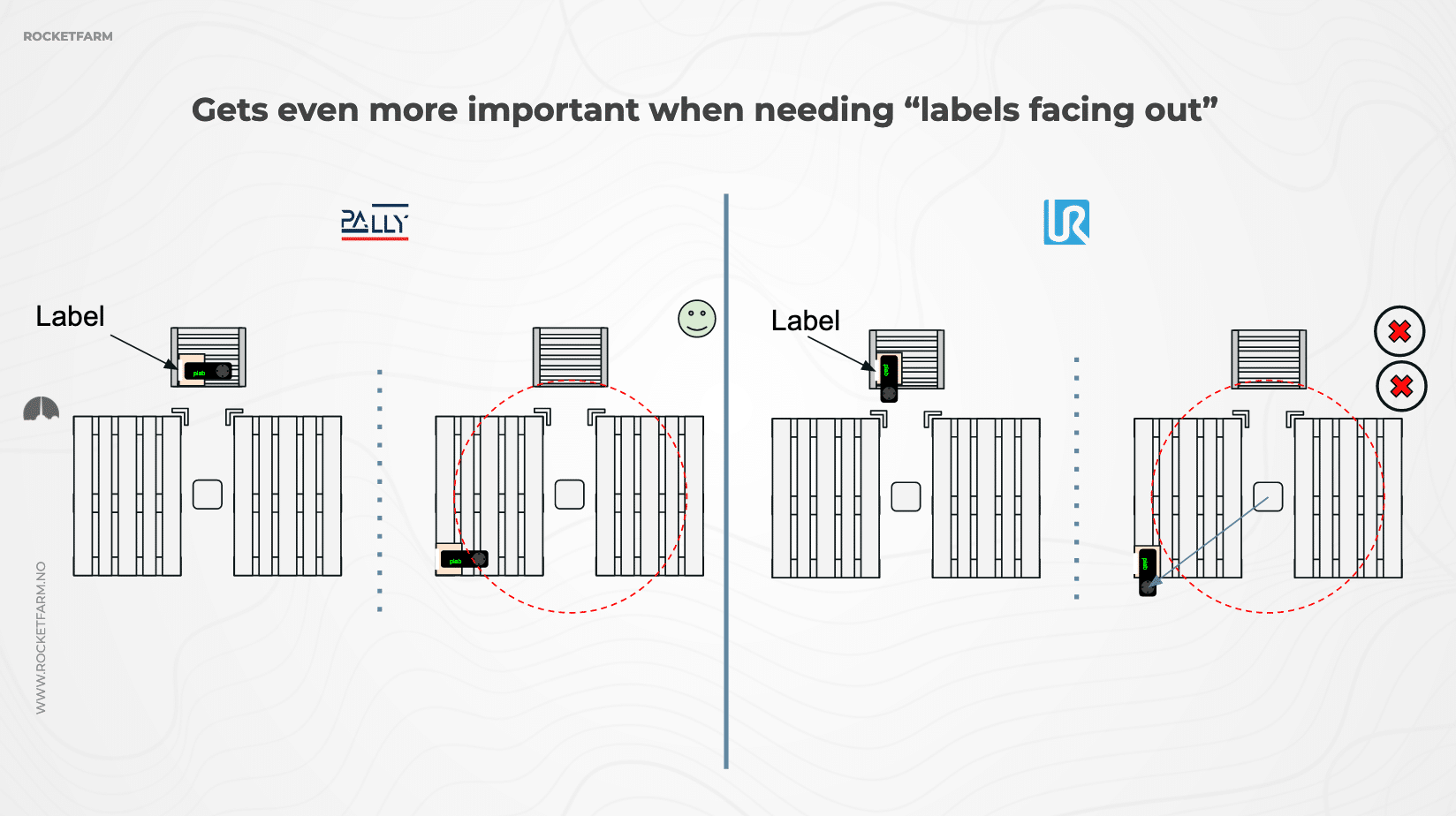
“Labels Facing Out”
As mentioned above – this is a typical customer requirement. It refers to wanting all labels facing outwards on the pallet.
UR Palletizing Template: Again, it’s entirely possible to create a pattern with labels facing out on the template. And if there’s plenty of reach for the pattern, it won’t be an issue. But if there’s a need to change the pick-up position for that one box, it needs to be hardcoded into the pattern.
Pally: Based on each specific palletizing pattern, Pally algorithms will calculate the ideal pick-up position for each box on each layer. Especially when it’s required to have one side in a specific direction, the ability to pick boxes from different positions makes a significant difference in reach.
Not just a question about possible or not possible
It’s also important to note that reach issues are not only a question of whether this specific project/pattern can be palletized with a cobot palletizing solution. It is also a question about hardware. It’s a question about how little hardware you need.
An example is the above-discussed reach issues, where the “simple” ability to change pick-up positions can be the difference between whether or not a lifting column is needed to reach the furthest boxes. The need for a lifting column is the difference of approximately 4000€ in Hardware investment alone. Not going into how much it’s worth to have fewer moving parts in your solution due to maintenance.
Productivity
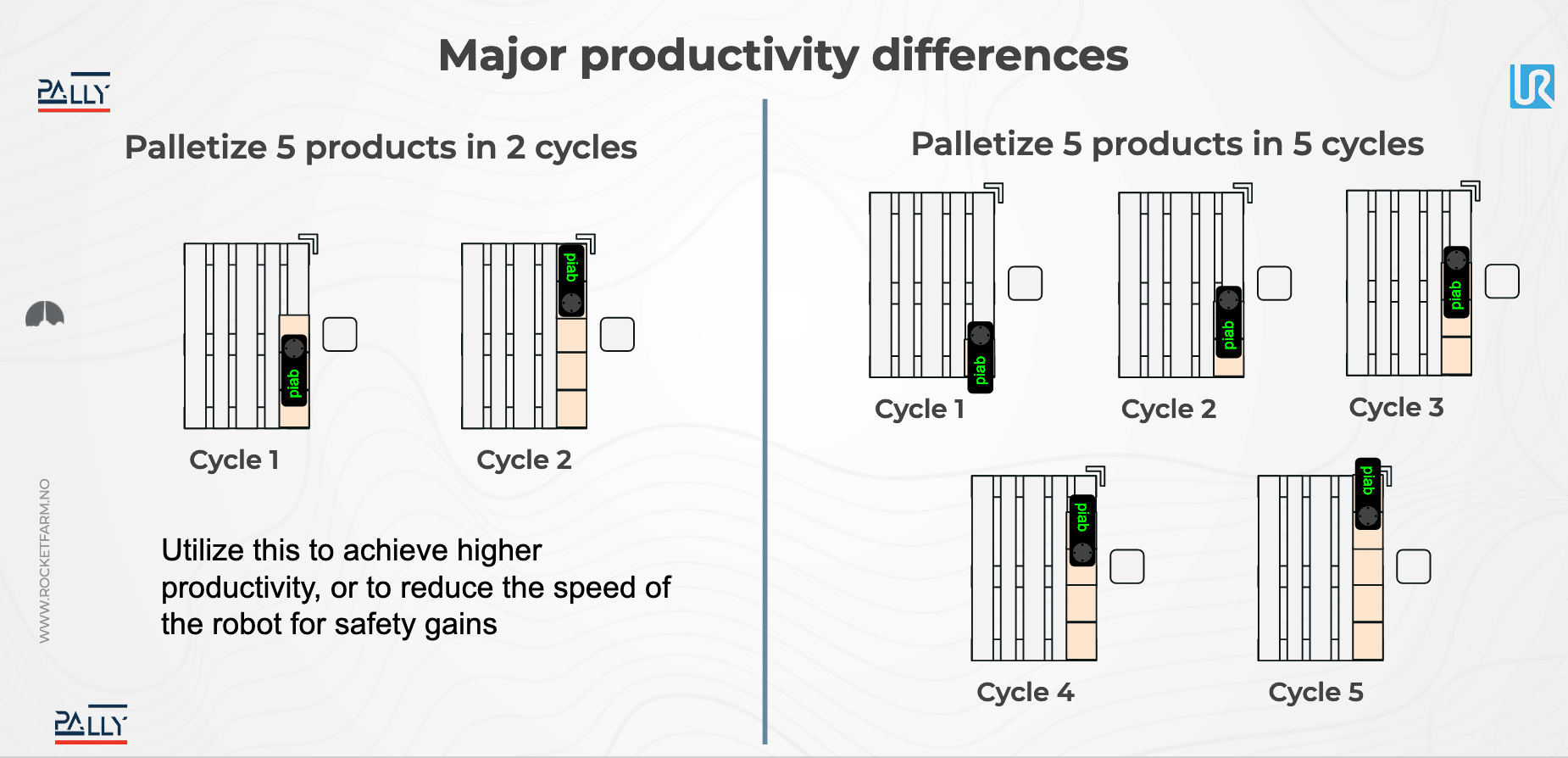
Multi-picking of boxes
Every customer will have their specific productivity requirements for the product(s) they need to have palletized. As a rule of thumb, the UR can do around 8-9 cycles per minute (CPM) with the standard collaborative settings. If the productivity requirements are higher than this, it is required to pick multi-pick boxes, with that meaning picking several boxes in each cycle.
UR Palletizing Template: The only way to do this is by “pretending” that multiple products are one product. However, the palletizing pattern may not be compatible with this approach as there may be a need to pick numerous products at one point in the palletizing sequence and a single product at another.
This type of “hack” is a lousy solution design that can create future problems for the customer.
Pally: With a feature called Smartpick, Pally will optimize the number of boxes picked to complete the pattern most efficiently. Pally will also automatically determine how many boxes it can pick based on product weight and dimensions. It won’t try to palletize something not within the reach of the robot. By doing the optimization, it’s possible to achieve higher productivity and/or safer movements.
When picking more products per cycle (as the amount of products picked is optimized), it is possible to reach a much higher productivity output.
This and this are examples where Pally reaches up to 24.67 boxes/min.
Solution Safety
Increased productivity offers customers the option to slow down the robot’s speed, which can create a safer work environment.
Tip: A bit off the chart, but as an additional note, it is worth mentioning that in palletizing automation, it is recommended to set the robot’s speed to the minimum level that meets production requirements.
These two robots are the perfect example regarding speed and safety. Although they have the same hardware, one is much safer than the other. Interestingly, the faster robot on the left is actually the safer one.
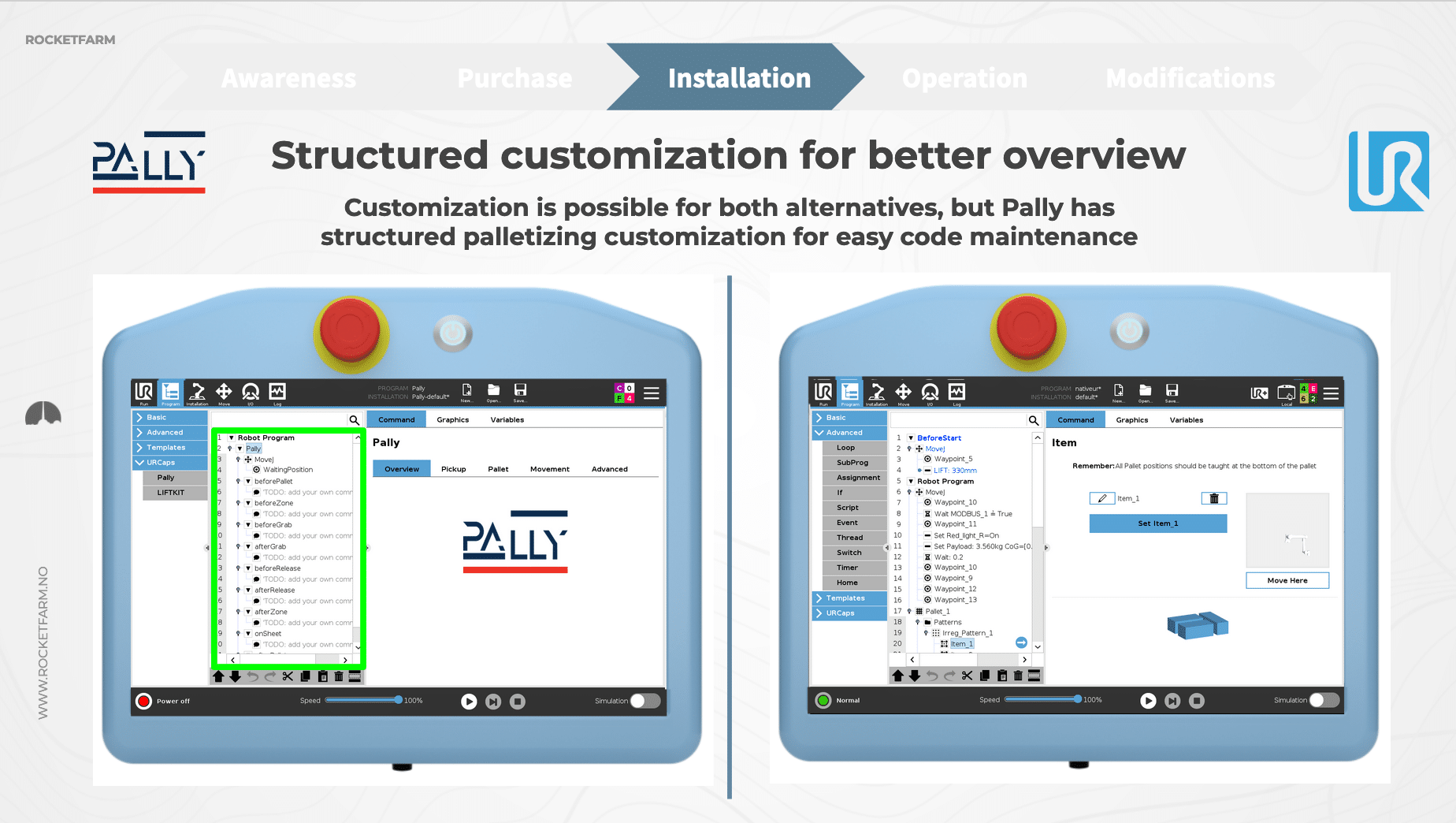
Robot Program Structure
Robot Program Structure is important during maintenance, changes, etc. It is possible to make a structured code for your program in both the Palletizing Template and Pally. In Pally, it is the standard.
With a structured code, it’s much easier to do maintenance in the future.
4. Operation Phase
The customer’s understanding of the capabilities of the palletizing solution and their satisfaction with its performance genuinely begin once the installation is complete and the system is operational.
The initial installation’s success significantly impacts the customer’s decision to purchase another robot, according to our feedback.
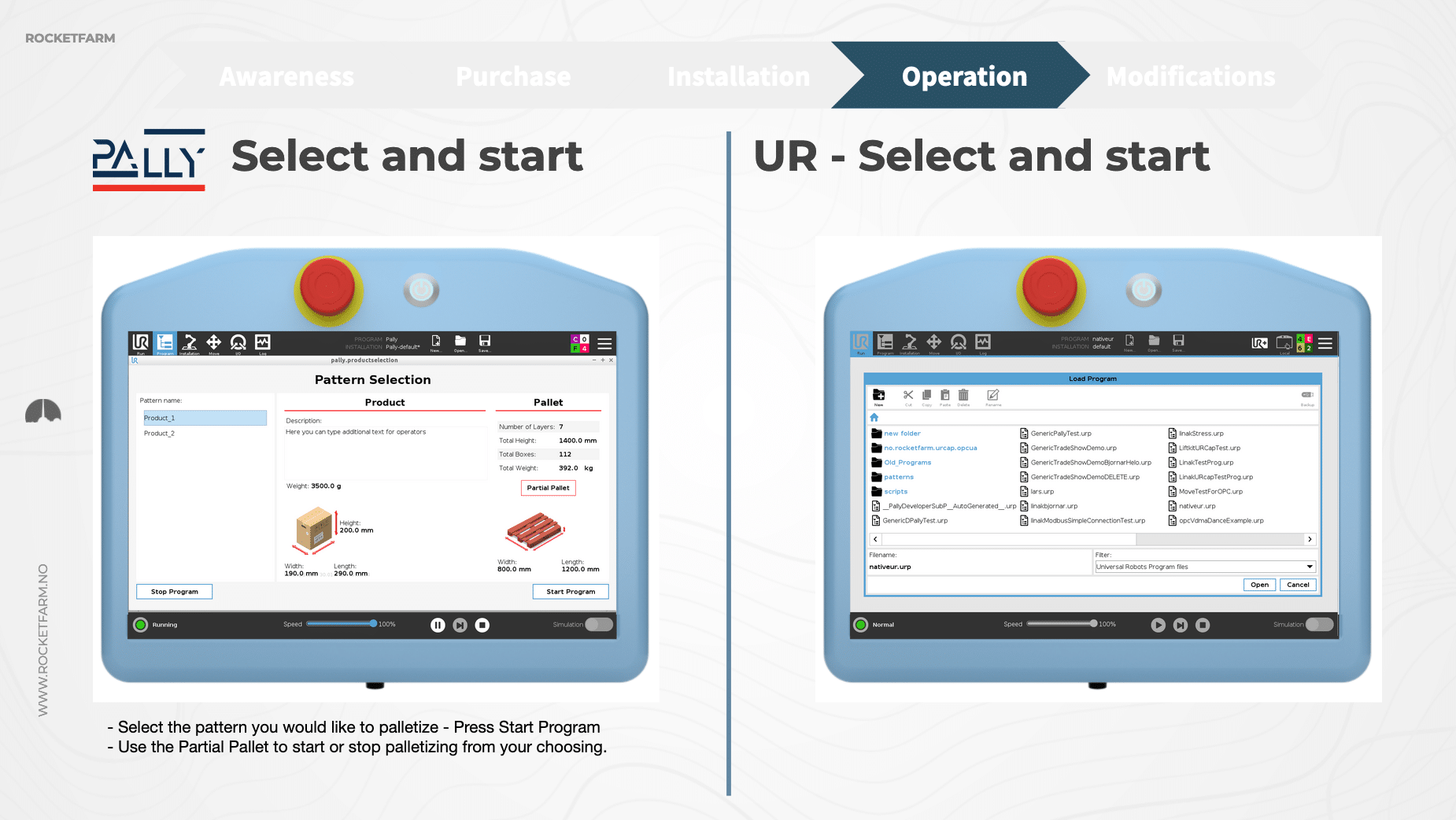
Starting the palletizing
UR Palletizing Template: In the native palletizing template of UR, you will select a specific program for each box type you wish to palletize, and then click start. Changing to a different pattern requires you to open a new program. This is a time-consuming process if you are changing production often.
Pally: In the Pally Operator Panel (available in 12 languages), choose the pattern you want to palletize and press Start Program. It’s that simple!
The patterns created in MyRobot.cloud is stored in Pally.
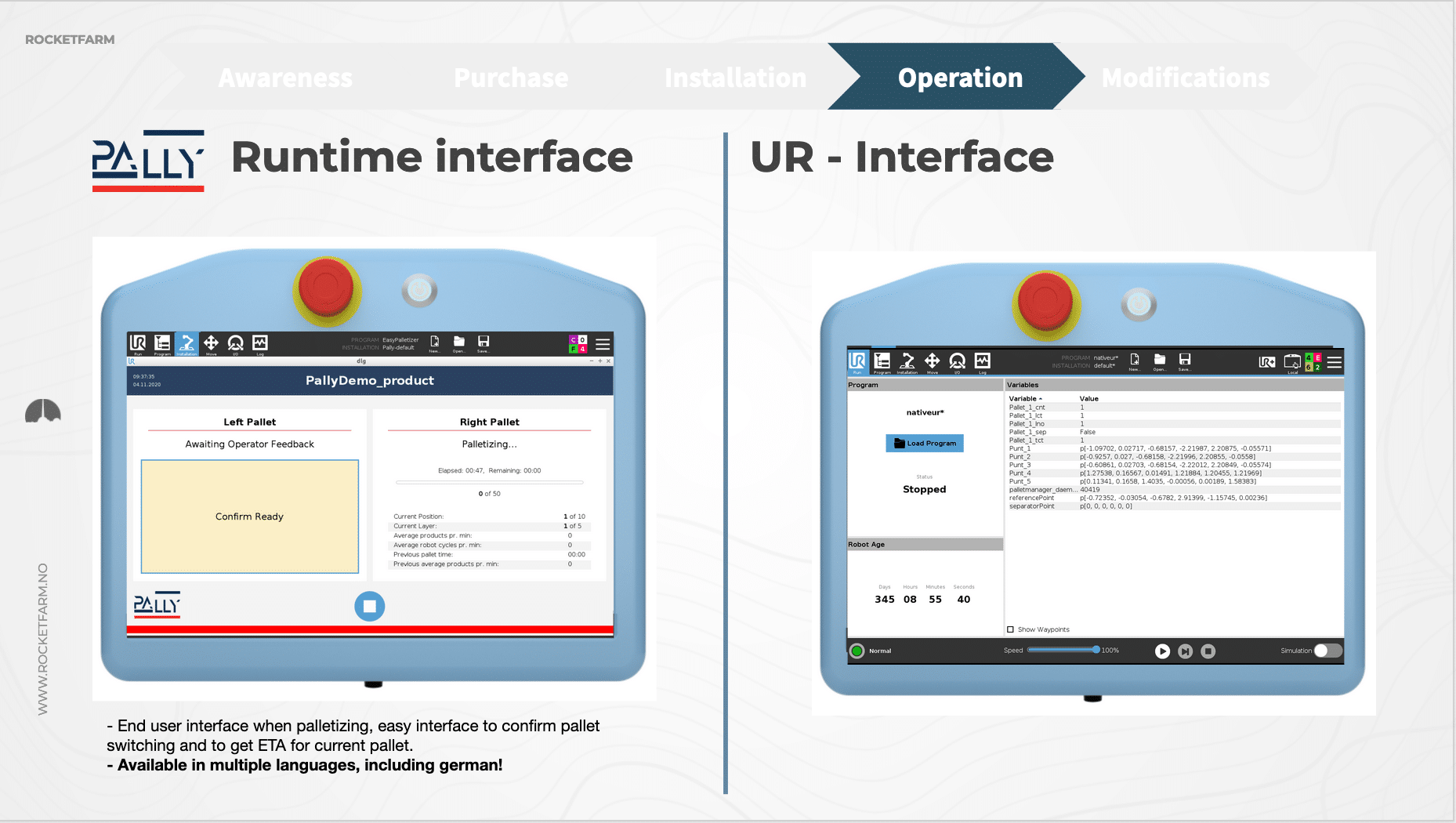
Runtime Interface
UR Palletizing Template: Not very easy to understand. You need to be trained with the UR interface to understand what is happening and what to do if anything unexpected happens.
Pally: Pally has a simple interface with live data of the palletizing. It’s easy to stop and start, and you can see when to expect the current pallet to be ready.
Available in 12 different languages. The operator needs no UR training to operate this runtime interface. Locking access outside this interface is possible, so only those who need access are allowed in.
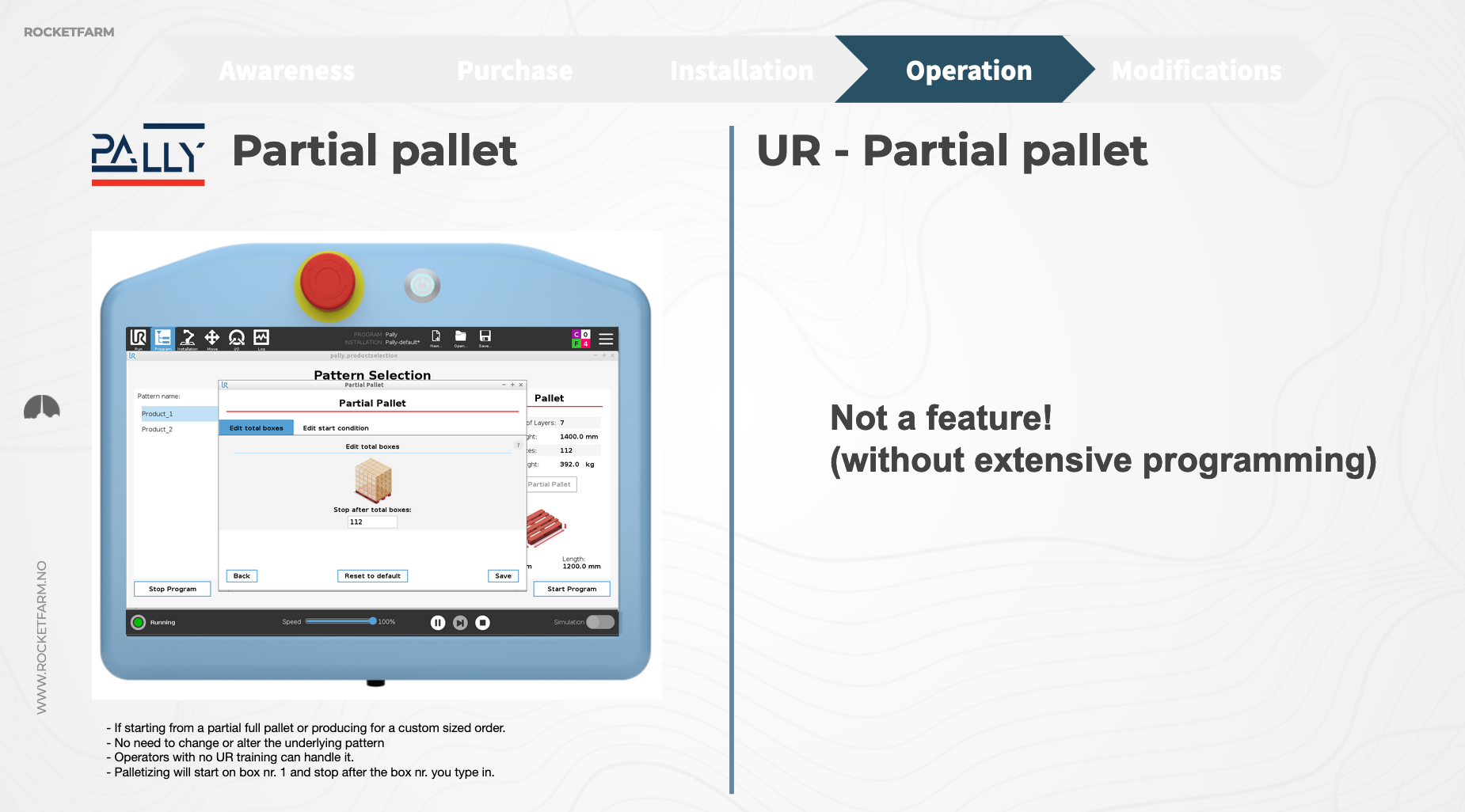
Partial Palletizing
The act of starting a pallet from a not-full pallet, or if the customer needs to produce a custom-sized order.
UR Palletizing Template: It’s not a feature. Can be done but requires extensive programming.
Not a feature on the UR Palletizing Template. It can be done but require significant programming effort to implement.
Pally: It can be done directly from the Pally Operator Panel (by anyone, also with no UR training). You can choose between stopping the palletizing after a certain amount of boxes or starting the palletizing at a given layer and box number.
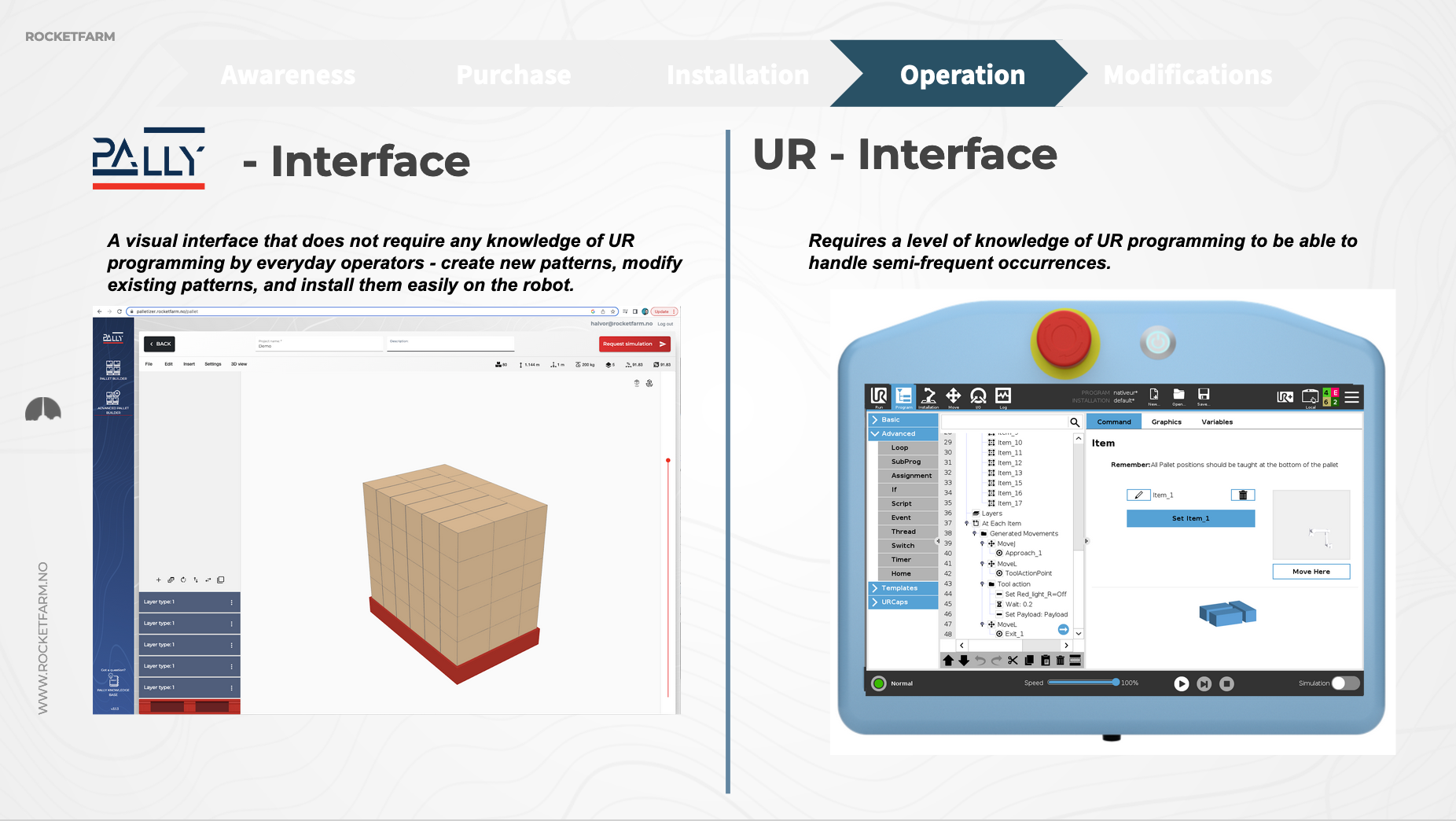
Adding/Changing Products
Adding/Changing Products is a regular occurrence at a customer site. Based on download data from our pattern generator in MyRobot.cloud, most customers are creating and downloading new patterns regularly.
This availability is where the difference between the palletizing template and Pally is significant. It also has a direct impact on customer satisfaction.
UR Palletizing Template: With the UR template, you program each palletizing pattern for all products. This programming requires skills and is a time-consuming operation. Any slightly “off normal” situation requires external expertise or is time-consuming.
Pally: Pally allows you to calibrate the installation or solution, enabling automatic adaptation of all path planning for new products or pallet patterns. Once calibrated, there is no need for additional programming when introducing new products! Simply locate the pattern created for the product next in line and press start, even while the robot is still palletizing the previous pattern – resulting in no downtime.
The key difference between the UR palletizing Template and Pally is that with Pally, the customer is empowered to do this on their own. They’re not with UR Palletizing Template, or at least only if they have a robotics engineer at hand. This is a major reason for dissatisfaction among customers.
Support
UR Palletizing Template: There is no defined support for the UR Palletizing Template.
Pally: You can contact your Integrator/Distributor with the training to handle support with Pally. If they don’t know the answer, Rocketfarm has a support team ready to help. And the tools to do so.
Supported by Digital Twins:
If you need help, send RF the backup file (a specific button in Pally) to support@rocketfarm.no, and we can build a digital twin model of your exact installation and figure out what is wrong.
Other things worth noting
Churn rate
The churn rate, or the rate of attrition or customer churn, is when customers stop doing business with an entity.
UR Palletizing Template: We don’t know the number of churns for obvious reasons. But we know that we have retro-fitted palletizing solutions from UR Palletizing Template to Pally – to the customer’s satisfaction.
Pally: Pally has a 0% churn rate. We believe thats because we empower the operators and the customers to handle any changes/upgrades independently. If they encounter any bugs/problems, our partners quickly help their customers by utilizing digital twin support.
Price
The price is one of the most distinct differences between the two options.
The UR Palletizing Template is free and is pre-installed on the UR cobot.
Regarding Pally Palletizing software, you need to purchase it as a Package Plan, where you get a free Pally URCap License (Perpetual license connected to Robot serial Number). The license is perpetual and will always continue to palletize. Access to the related software offerings, MyRobot.cloud (pattern generator and digital twin support), and Pally Operator Panel (Teach Pendant User Interface for operators) are time-limited and will be available as long as you have a valid plan. Our plans are available for a duration between six months to 7 years, with pricing starting at 2150€.
Want to learn more about the pricing of a Cobot Palletizing solution powered by Pally? Contact us today!
Recommendation(s)
Columbia/Okura LLC, with 25 years of robot palletizing experience and other leading solution providers, chose Pally to power their offerings rather than relying on the UR Palletizing Template.
Jason Brewer, the Robotic Systems Integration Engineer at Columbia/Okura LLC, has great things to say about Pally:
Pally is the brain behind our cobot palletizing solution miniPAL®. The software allows miniPAL® to do more and benefit more customers. We build the hardware, and Rocketfarm makes the software, allowing us to create the best possible solution.
Jason Brewer Robotics Systems Integration Engineer Columbia/Okkura LLC
Conclusion
Actually – we won’t make any conclusion as we’ll leave it up to you to decide what is best for you, the UR palletizing template or Pally. What we have done here is highlight the key differentiators between the Palletizing Template and Pally. We have done so so you can make an informed decision on the best choice for you.
If you have any comments on this comparison, please get in touch with me directly at martin@rocketfarm.no. If you have any further questions about palletizing, contact us at pally@rocketfarm.no.
Sign up for our newsletter and get a FREE ebook
By signing up for our monthly newsletter, you’ll get case stories, product launches, and tips to automate your production line!