
OPC UA URCap
for Universal Robots
Unlock the full potential of Industry 4.0 with seamless OPC UA integration for Universal Robots. Our URCap enables effortless communication using OPC UA, the leading protocol for industrial automation. It also includes object structures fully aligned with VDMA standards.

Why Choose OPC UA for UR?
Three key reasons to integrate the OPC UA URCap in your production:
Easy to Install and Implement
A simple, cost-effective solution for immediate integration.
Fully Customizable to Your Needs
Tailor the software to your specific setup, complete with integrated security features.
Compatible Across UR Models
Works effortlessly with both CB3 and e-series robots.
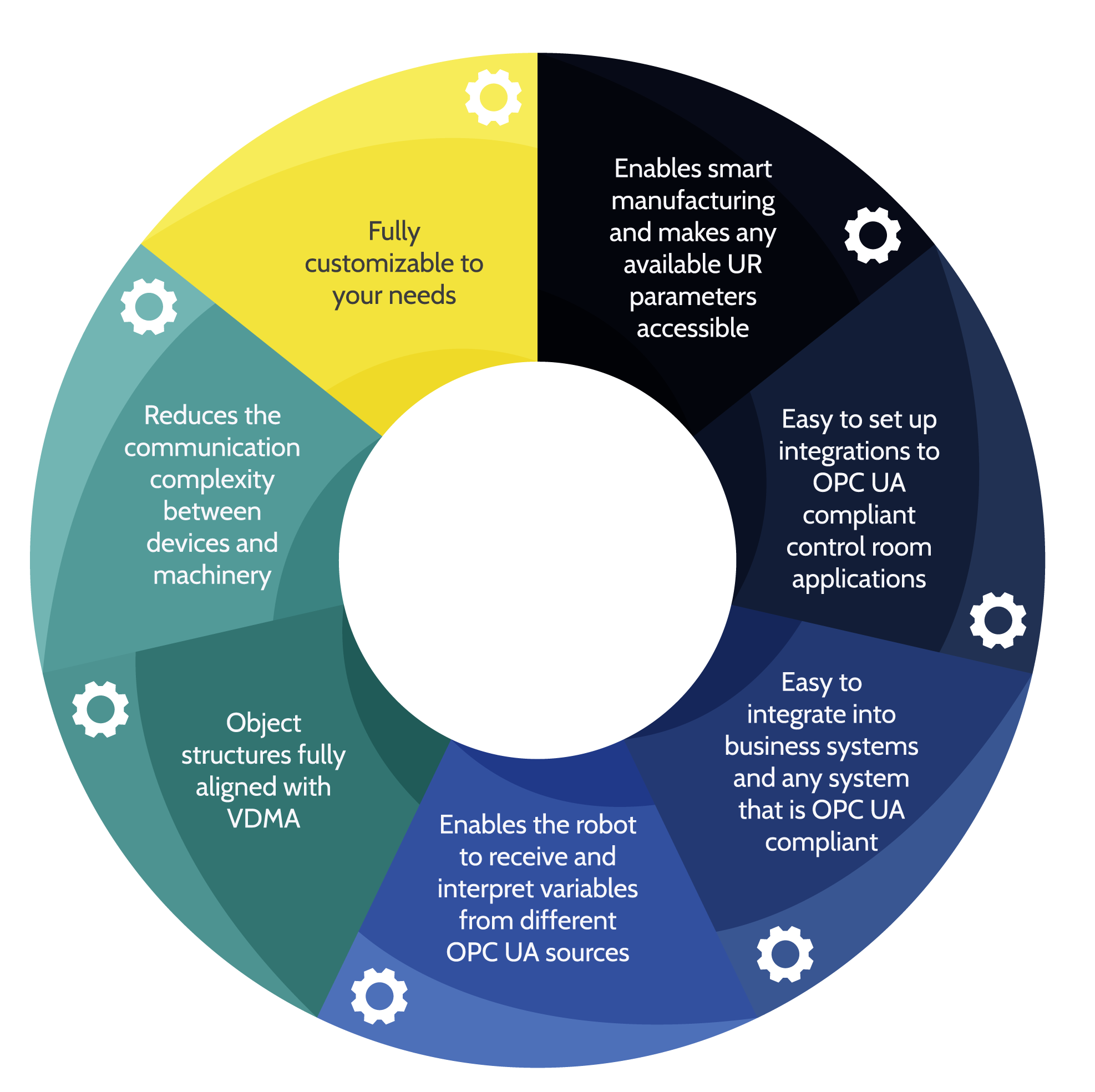
Main Features
Our OPC UA URCap stands out as the only software that translates data from Universal Robots into OPC UA format, enabling true Industry 4.0 connectivity.
This software ensures your UR robots are fully compatible with other OPC UA-enabled devices and systems.
Get started with your free trial today, or purchase a full license to unlock the full potential of your UR robots!
For more information, contact us at opc@rocketfarm.no.
Technical Overview
In today’s automated world, seamless communication between machines and control centers is crucial, and OPC UA stands out as a leading, scalable protocol.
Our OPC UA URCap enables your UR robot to act as both server and client, seamlessly translating robot data into OPC UA format and sending it to the desired Server/Client for smooth integration with your network.
With secure communication via encrypted connections and bi-directional data flow, robots can both send and receive data from external OPC UA servers, translating it into actionable variables.
The URCap also supports key VDMA functionalities, such as:
Learn more about VDMA standards here and download the user manual to configure the OPC UA URCap for improved communication and performance in your production environment.
*$2300.
How to Use the OPC UA URCap
Learn how to configure and operate the OPC UA URCap’s client and server functions.
In this demo, we successfully installed the URCap on two robots, one CB-series and one e-series, and set one up as an OPC UA server and the other as a client, enabling bidirectional data exchange.
FAQ for OPC UA URCap
Frequently asked questions (FAQ) for the OPC UA URCap. Software that connects Universal Robots to OPC UA. Continuously updated.
Sign Up for Our Newsletter
Sign up for case studies, product launches, and expert tips to automate your production line.