
dPally URCap
Your advanced Depalletizing Software for Seamless Automation
Looking for an efficient and flexible depalletizing solution? Rocketfarm’s dPally URCap delivers smooth, safe, and fast operations.

Why Depalletizing?
Unlike palletizing, depalletizing involves variable conditions such as box placement and pallet types, and is a more challenging task overall. One important reason is that picking boxes from a full pallet is less accurate than picking them from a conveyor belt. Learn how depalletizing differs from palletizing here.
dPally addresses these challenges with optimized path planning, controlled pick-up, and adaptable hardware integration – ensuring accuracy and efficiency every time.
Get To Know dPally
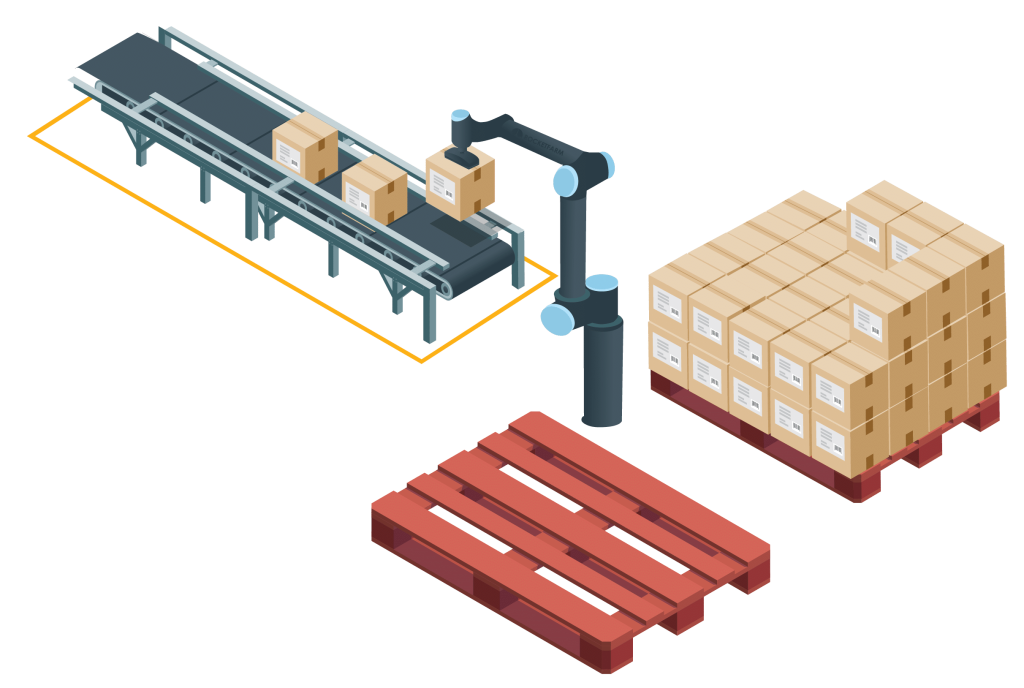
Depalletizing Made Easy
The dPally URCap is developed based on our well-established Pally Software, the fastest collaborative palletizing software on the market.
dPally is designed to handle complex tasks efficiently. It requires no vision system and is a cost-effective solution that supports custom-built and standard hardware. It is also the most advanced depalletizing software for Universal Robots, as you can depalletize from two pallets onto two conveyor belts.
Up to 30 CPM
Compatible with UR12e, UR20, UR30, UR15 & UR8 Long.
No-code installation
What Makes dPally Stand Out

Get In Touch
If you want to expand your automation offerings, dPally is designed to help your business thrive. Contact us to schedule a demo and learn more.
Brigt
Sales Lead
+47 969 14 006 (08:00 – 16:00 CET)
brigt.roysum@rocketfarm.no